图是一种复杂的数据结构,结点之间的关系可以是任意的,任意两个数据元素之间都有可能相关。
例如,RunicDolphin806在游玩《群星》游戏时
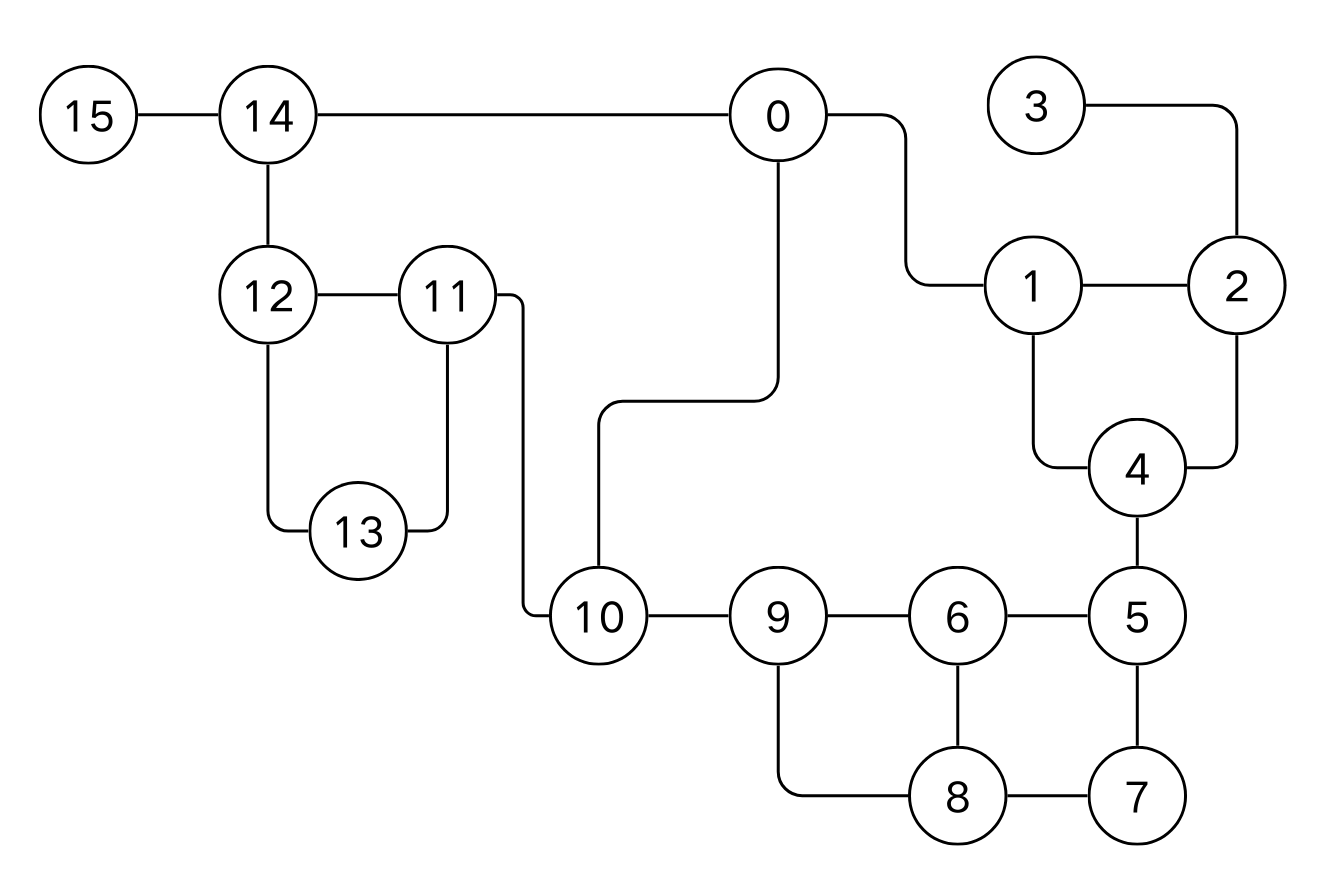
这部分地图可以简化为一个图: 地图
图

图的基本概念
| 概念 | 解释 |
|---|---|
| 顶点 | 图中的数据元素,记为 $V$ |
| 弧 | 若 $\left<v,w\right> \in VR$,则 $\left<v,w\right>$ 表示从 $v$ 到 $w$ 的一条弧, 且称 $v$ 为弧尾(初始点),$w$ 为弧头(终端点) |
| 边 | 若 $\left<v,w\right> \in VR$ 且 $\left<w,v\right> \in VR$,则可记这两条弧为一条边 |
| 无向图 | 若 $\left<v,w\right> \in VR$ 时必有 $\left<w,v\right> \in VR$,则此时称该图为无向图 |
| 完全图 | 对于 $n$ 个顶点的无向图,若有 $\displaystyle \frac{n(n-1)}{2}$ 条边,则称为完全图 |
| 有向完全图 | 对于 $n$ 个顶点的有向图,若有 $n(n-1)$ 条弧,则称为有向完全图 |
| 权 | 与图的边或弧相关的数 |
| 子图 | 对于两个图 $G=(V,\{E\})$ 和 $G'=(V',\{E'\})$,如果 $V' \subseteq V$ 且 $E' \subseteq E$,则称 $G'$ 是 $G$ 的子图 |
图的存储
邻接矩阵
设图 $G = (V,E)$ 是一个有 $n$ 个顶点的图,则其邻接矩阵是一个二维数组 G.edge[n][n],定义
由定义可知,无向图的邻接矩阵是对称的。
邻接表
邻接表是图的一种链式存储结构
设图中有 $n$ 个顶点,$e$ 条边,则
- 用邻接表表示无向图时,需要 $n$ 个顶点结点,$2e$ 个边结点;
- 用邻接表表示有向图时,若不考虑逆邻接表,只需 $n$ 个顶点结点,$e$ 个边结点
1/* ----- 顶点 ----- */
2typedef char VertexData;
3typedef int EdgeData;
4
5struct node {
6 int dest; // 目标顶点位置
7 EdgeData cost; // 边的权值
8 node *link; // 下一条边的指针
9};
10
11/* ----- 顶点的邻接链表 ----- */
12struct vnode {
13 VertexData data; // 顶点数据域
14 node *adj; // 边链表头指针
15};
16
17/* ----- 图 ----- */
18struct adjgraph {
19 vnode VetList[MaxVexNum]; // 邻接表
20 int n,e; // 图中当前的顶点个数与边数
21};
邻接表的示意图如下:
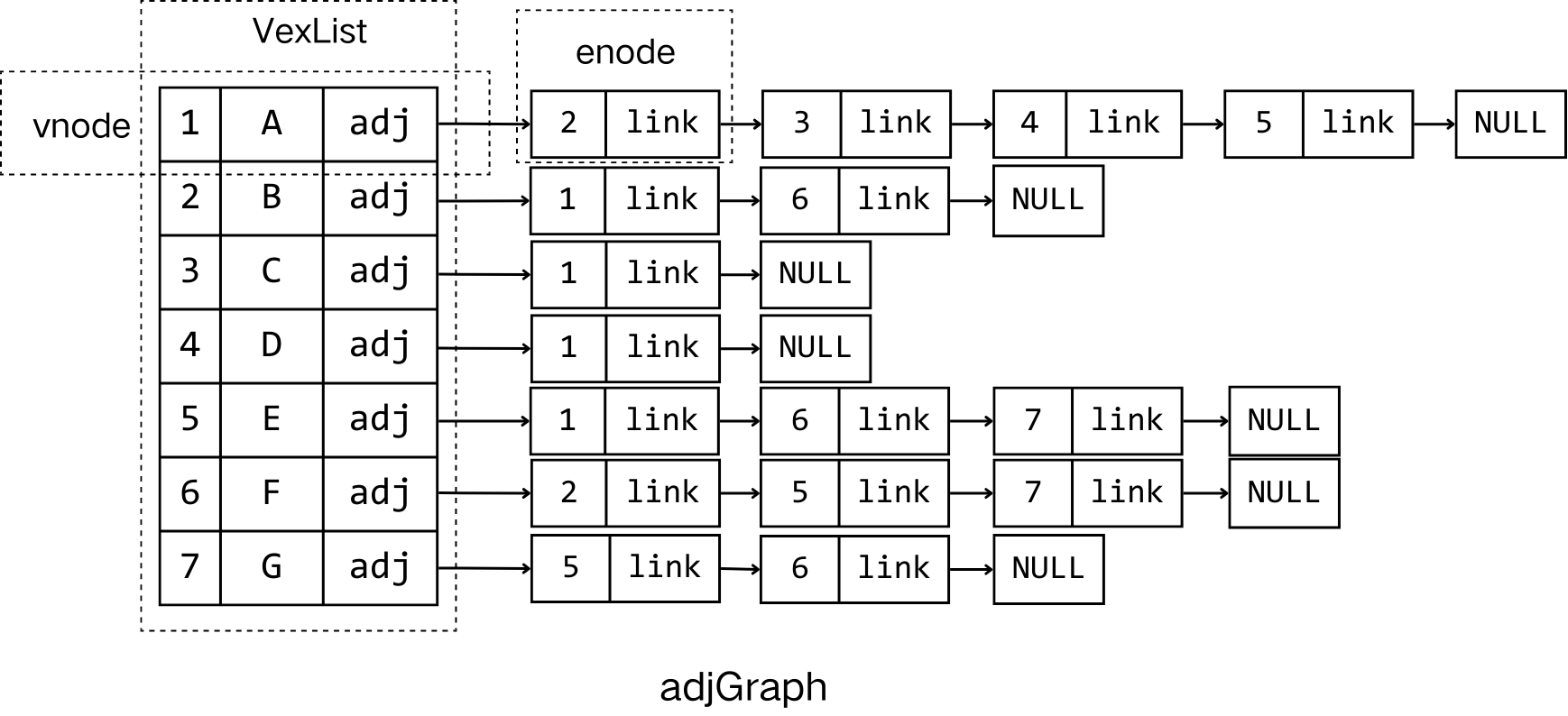
邻接表
图的遍历
深度优先搜索(DFS)
基本步骤:
- 访问图的某一个起始顶点 $v$ 后,由 $v$ 出发,访问它的任意一个未访问的邻接结点 $w_1$;
- 再从 $w_1$ 出发,访问与 $w_1$ 邻接但还没有访问过的顶点 $w_2$;
- 再从 $w_2$ 出发,重复过程2;
- 直到到达所有邻接结点都被访问过的某个顶点 $u$;
- 退回到访问顶点 $u$ 之前访问的顶点,若还有未访问的邻接结点,则再从此结点出发重复过程2;如果没有,则继续回退;
- 重复上述过程,直到所有的顶点都被访问一次为止。
特点:
- 采用递归或栈的形式进行;
- 对每个顶点至多调用一次 DFS 函数;
- 时间复杂度取决于所采用的存储结构:邻接矩阵 $O(n^2)$,邻接表 $O(n+e)$
递归形式:
1/* ----- 深度优先搜索(递归形式)----- */
2void Graph_Traverse(adjGraph &G) {
3 int visit[16] = {0};
4
5 for (int i = 1; i<=15; i++) {
6 if (!visit[i]); {
7 DFS(G, i, visit[]);
8 }
9 }
10}
11
12void DFS_recursion(adjGraph &G, int v, int visit[]) {
13 printf("%c", G.Vexlist[v].data);
14 visit[v] = 1;
15 enode *w = G.Vexlist[v].adj;
16
17 while (w != NULL) {
18 if (!visit[w->dest]) {
19 DFS_recursion(G, w, visit[]);
20 }
21 w = w->link;
22 }
23}
栈形式:
1/* ----- 深度优先搜索(栈形式) ----- */
2void DFS_stack(adjGraph &G) {
3 int visit[16] = {0};
4
5 // 每个连通分支调用一次DFS
6 for (int i = 1; i <= 15; i++) {
7 if (!visit[i]) {
8 stack<int> s;
9 s.push(i);
10
11 while (!s.empty()) {
12 int top = s.top();
13 s.pop();
14
15 if (!visit[top]) {
16 printf("%c", G.Vexlist[top].data);
17 visit[top] = 1;
18 }
19
20 // 将所有未访问的邻接节点入栈
21 enode *w = G.Vexlist[top].adj;
22 while (w != NULL) {
23 if (!visit[w->dest]) {
24 s.push(w->dest);
25 }
26 w = w->link;
27 }
28 }
29 }
30 }
31}
广度优先搜索(BFS)
基本步骤:
- 访问起始顶点 $v$;
- 由 $v$ 出发,依次访问 $v$ 的各个未被访问过的邻接顶点 $w_1$,$w_2$,$\cdots$, $w_t$;
- 再顺序访问 $w_1$,$w_2$,$\cdots$, $w_t$ 的所有还未被访问过的邻接顶点;
- 再从这些访问过的顶点出发,再访问它们的所有还未被访问过的邻接顶点,以此类推,直到图中所有顶点都被访问到为止。
特点:
- BFS 遍历图的时间复杂度和 DFS 遍历的时间复杂度相同;
- 耗费的时间均取决于所采用的存储结构:邻接矩阵 $O(n^2)$,邻接表 $O(n+e)$;
- BFS 和 DFS 仅是对顶点的访问顺序不同。
队列形式:
1// 广度优先搜索
2void BFS(adjGraph &G) {
3 int visit[16] = {0};
4 for (int i = 1; i<=15; i++) {
5 if (!visit[i]) {
6 printf("%c", G.Vexlist[i].data);
7 visit[i] = 1;
8
9 queue<int> q;
10
11 q.push(i);
12
13 while (!q.empty()) {
14 int head = q.front();
15 q.pop();
16
17 enode *w = G.Vexlist[head].adj;
18 while (w != NULL) {
19 if (!visit[w->dest]) {
20 printf("%c", G.Vexlist[w->dest].data);
21 visit[w->dest] = 1;
22 q.push(w->dest);
23 }
24 w = w->link;
25 }
26 }
27 }
28 }
29}
最小生成树
对于一个有 $n$ 个顶点的图,必须且仅用该网络中的 $n-1$ 条边来联结网络中的 $n$ 个顶点;不能产生回路;各边权值总和最小的树。
Prim 算法是求最小生成树的一种有效方法:
- 已知,图 $N =(V,E)$,生成树顶点集合 $U$;
- 从某一顶点 $u_0$ 出发,选择与它关联的具有最小权值的边 $(u_0,v)$,将顶点 $v$ 加入到生成树顶点集合 $U$ 中;
- 每次从一个顶点在 $U$ 中,而另一个顶点不在 $U$(即 $V-U$)中的各条边中选择权值最小的边 $(u,u')$,把它的顶点 $v$ 加入到集合 $U$ 中;
- 直至网络中的所有顶点都加入到生成树顶点集合 $U$ 中为止。
| 辅助数组 | 作用 |
|---|---|
lowcost[] |
存放生成树顶点集合 $U$ 内顶点到生成树外 $V-U$ 各顶点的各边上的当前最小权值 |
adjvex[] |
记录生成树顶点集合外各顶点 $u'$ 距离集合内哪个顶点 $u$ 最近,否则记录为 -1 |
1/* ----- Prim 算法求最小生成树 ----- */
2void Prim(Graph &G, int u) { // u 表示初始时的顶点
3 int lowcost[G.n] = {0};
4 int adjvex[G.n] = {0};
5
6 for (int i = 0; i < G.n; i++) {
7 lowcost[i] = G.edge[u][i];
8 adjvex[i] = u;
9 }
10 adjvex[u] = -1;
11
12 // 查找最小的lowcost
13 for (int i = 0; i < G.n && i != u; i++) {
14 EdgeData min = MaxValue;
15 int v = 0;
16 // 查找生成树外顶点到生成树内顶点具有最小权值的边,v是当前具有最小权值的边
17 for (int j = 0; j < G.n; j++) {
18 if (adjvex[j] != -1 && lowcost[j] < min) {
19 v = j;
20 min = lowcost[w];
21 }
22 }
23 // v != 0 表示找到所求的边,并加入生成树
24 if (v != 0) {
25 printf("%d, %d, %d", adjvex[v], v, lowcost[v]);
26 adjvex[v] = -1;
27 // 更新 adjvex 和 lowcost 数组
28 for (int j = 0; j < G.n; j++) {
29 if (adjvex[j] != -1 && G.edge[v][j] < lowcost[j]) {
30 lowcost[j] = G.edge[v][j];
31 adjvex[j] = v;
32 }
33 }
34 }
35 }
36}
活动网络
AOV网络
用有向图表示一个工程。在这种有向图中,用顶点表示活动,用有向边 $\left< v_i, v_j \right>$ 表示活动 $v_i$ 必须先于活动 $v_j$ 进行。这种有向图叫做顶点表示活动的 AOV 网络。
将各个顶点(代表各个活动)排列成一个线性有序的序列,使得 AOV 网络中所有应存在的前驱和后继关系都能得到满足。这种构造 AOV 网络全部顶点的拓扑有序序列的运算就叫做拓扑排序。
例如,下图的一个拓扑有序序列为:$C_1, C_2, C_3, C_4, C_5, C_6, C_8, C_9, C_7$
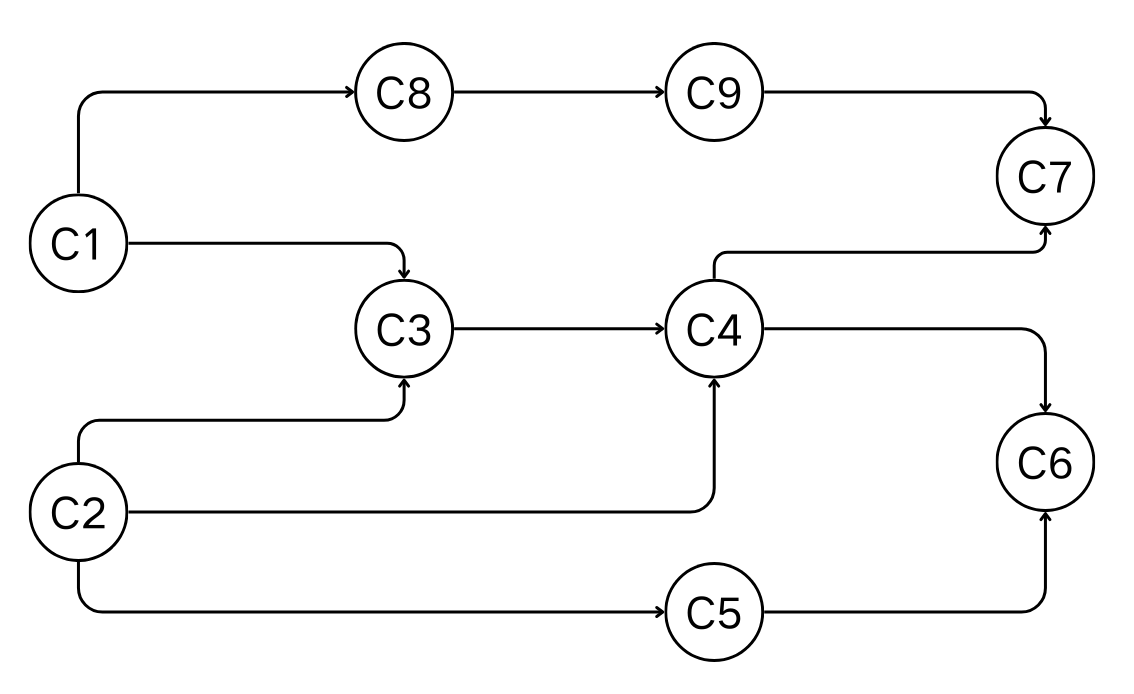
AOV网络
在邻接表中增设一个数组count[],记录各顶点入度。入度为零的顶点即无前驱顶点。在输入数据前,顶点表VexList[] 和入度数组count[]全部初始化。在输入数据时,每输入一条边<j, k>,就需要建立一个边结点,并将它链入相应边链表中,统计入度信息:
1EdgeNode *p = new EdgeNode;
2p->dest = k; // 建立边结点
3p->link = G.VexList[j].adj; // 链入顶点 j 的边链表的前端
4VexList[j].adj = p;
5count[k]++; // 顶点 k 入度加一
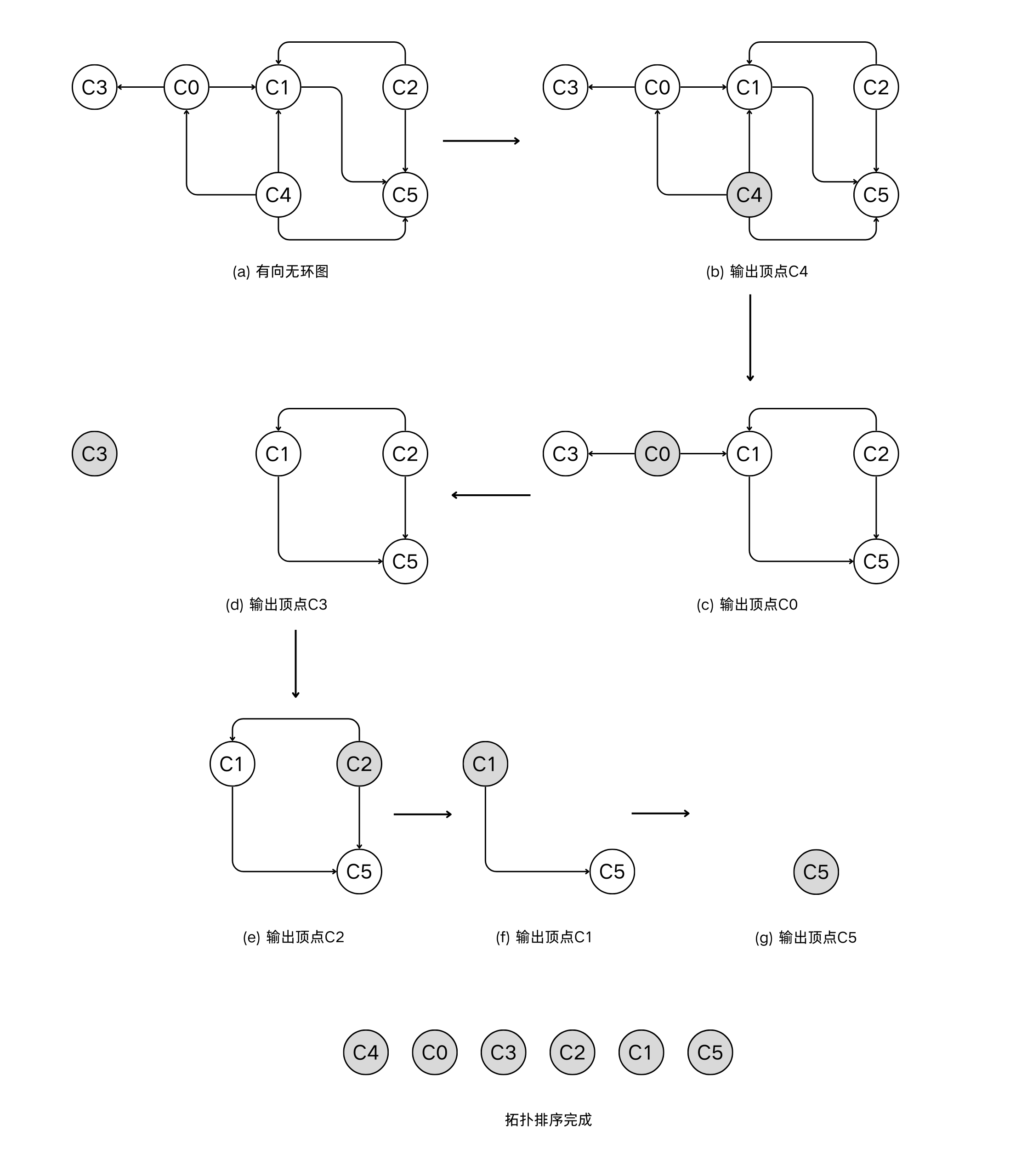
拓扑排序算法实现:
- 输入 AOV 网络,令 $n$ 为顶点个数。
- 在 AOV 网络中选一个没有直接前驱的顶点,并输出之;
- 从图中删去该顶点,同时删去所有它发出的有向边;
- 重复以上 1,2步,直到全部顶点均已输出,拓扑排序完成,说明无有向环;或还有未输出的顶点,但已跳出处理循环,说明图中剩下的顶点都有直接前驱。这时网络中必存在有向环。
1void TopologicalSort(adjGraph &G) {
2 stack S; int j = 0;
3 // 入度为零的顶点栈初始化
4 if (!s.empty()) {
5 s.pop();
6 }
7
8 for (int i = 0; i < G.n; i++) {
9 // 将入度为0的顶点进栈
10 if (count[i] == 0) {
11 s.push(i);
12 }
13 }
14 // 期望输出n个顶点
15 for (int i = 0; i < G.n; i++) {
16 if (s.empty()) {
17 return; // 中途栈空,退出
18 } // 网络中有回路,退出
19 else { // 继续拓扑排序
20 j = s.top();
21 printf("%d \n", j);
22
23 // 扫描出边表,更新与j相连的顶点入度
24 EdgeNode * p = G.VexList[j].adj;
25 while (p != NULL) {
26 // 获得另一顶点
27 int k = p->dest;
28 if(count[k] == 0) {
29 s.push(k); // 将入度为零的顶点进栈
30 count[k]-- ; // 顶点入度减一
31 }
32 p = p->link;
33 }
34 }
35 }
36}
AOE网络
如果在有向无环的带权图中,用有向边表示一个工程中的活动,用边上权值表示活动持续时间,用顶点表示事件,则这样的有向图叫做用边表示活动的网络,简称 AOE 网络。
完成工程的最短时间是从开始点到完成点的最长路径的长度。
| 概念 | 内容 |
|---|---|
| 关键路径 | 路径长度最长的路径 |
e[i] |
活动 $a_i$ 的最早开始时间 |
l[i] |
活动 $a_i$ 的最迟开始时间 |
l[i]-e[i] |
完成活动 $a_i$ 的时间余量 |
| 关键活动 | 满足 l[i] == e[i] 的活动 $a_i$ |
求关键路径的算法:
- 输入 $e$ 条弧
<j,k>,建立 AOE 网的存储结构; - 从源点 $v_0$ 出发,令
ve[0] = 0,按拓扑排序求出其余各顶点的最早发生时间ve[i]$(1 \leqslant i \leqslant n-1)$。如果得到的拓扑有序序列中顶点个数小于网中的顶点数 $n$,则说明网中存在环,不能求关键路径; - 从汇点 $v_n$ 出发,令
vl[n-1] = ve[n-1],按逆拓扑有序求出其余各顶点的最迟发生时间vl[i]$(2 \leqslant i \leqslant n-2)$; - 根据各顶点的
ve和vl值,求每条弧 $s$ 最早开始时间e(s)和最迟开始时间l(s)。若某条弧满足条件e(s) = l(s),则为关键活动。
最短路径
从图中某一顶点(源点)到达另一顶点(终点)的路径可能不止一条,找到一条路径使得沿此路径上各边上的权值总和达到最小的过程。
| 算法 | 适用问题 |
|---|---|
| Dijkstra算法 | 边上权值非负情形的单源最短路径问题 |
| Bellman和Ford算法 | 边上权值为任意值的单源最短路径问题 |
| Floyd算法 | 所有顶点之间的最短路径 |
单源最短路径问题
给定一个带权有向图 $G$ 与源点 $v$,求从 $v$ 到 $G$ 中其它顶点的最短路径(限定各边上的权值大于或等于 0)。
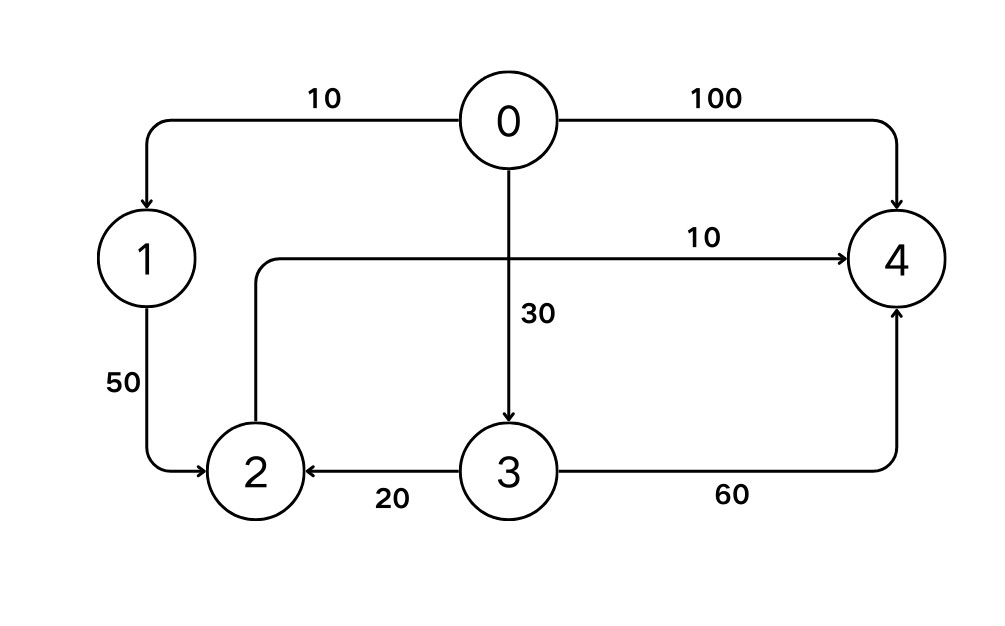
最短路径问题
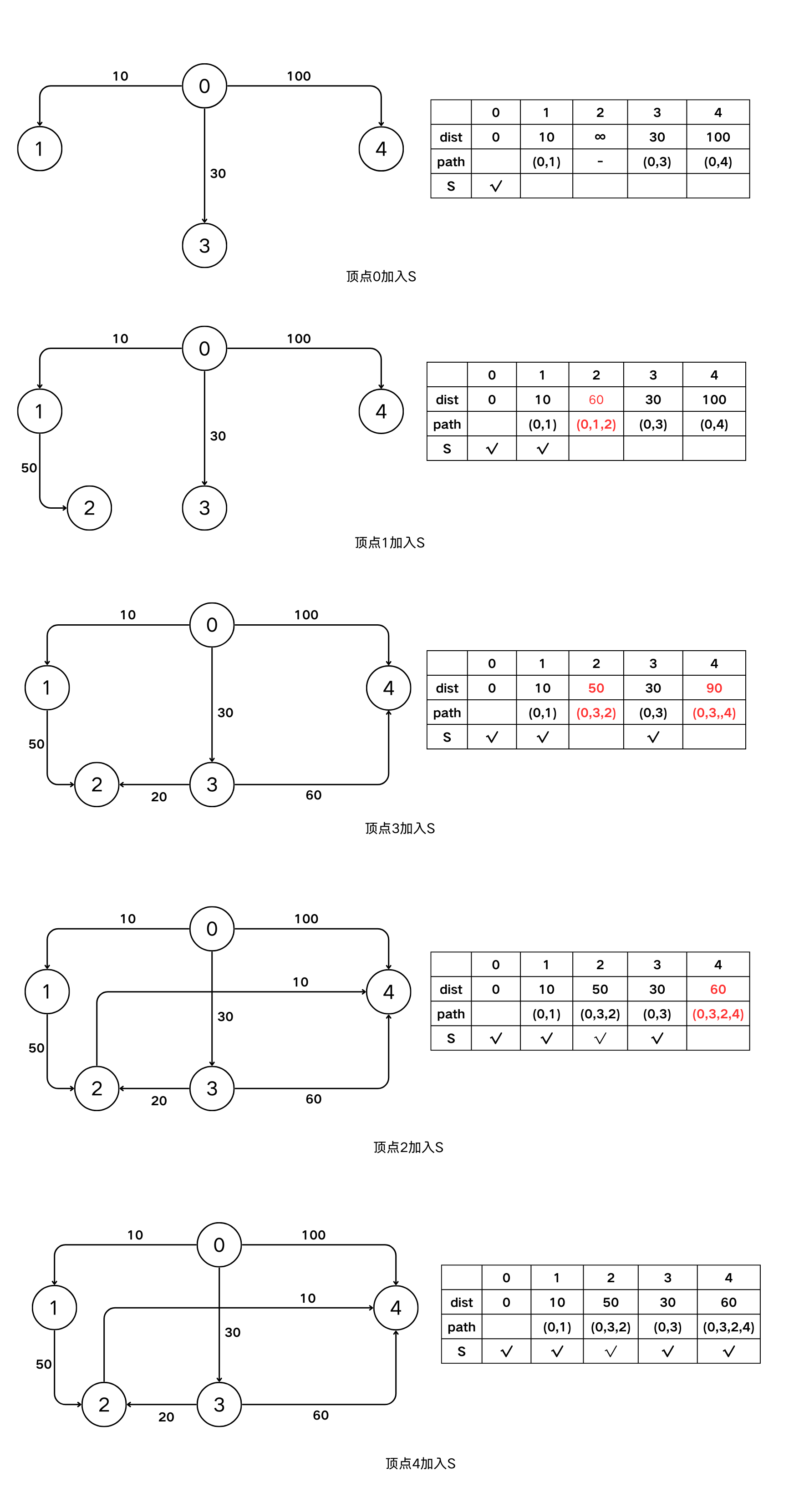
Dijkstra 算法
- 首先求出长度最短的一条最短路径;
- 再参照它求出长度次短的一条最短路径;依次类推……
- 直到从顶点 $v$ 到其它各顶点的最短路径全部求出为止。
引入辅助数组
dist[]。它的每一个分量dist[i]表示当前找到的从源点v0到终点vi的最短路径的长度。
| 步骤 | 操作 |
|---|---|
| 初始状态 | 若从源点v0到顶点vi有边,则dist[i]为该边上的权值;若从源点 v0到顶点vi无边,则dist[i]为 $\infty$。 |
求dist[]数组 |
长度为 $\mathrm{dist[j]} = \underset{i}{\mathrm{min}}\{\mathrm{dist}[i] \ |\ v_i \in V\}$ 的路径是从源点v0出发的长度最短的最短路径,其值为(v0, vj)的最短路径的长度。 |
| 求解次短路径 | 假设次短路径终点为vk,则这条最短路径或为(v0, vk),或为(v0, vj, vk);次短路径长度为edge[0][k]或dist[j] + edge[j][k] |
更新dist[]数组 |
每次求得一条最短路径后,其终点vk加入集合S,然后对所有的 $v_i \in V-S$,修改其dist[i]值。 |
假设 $S$ 是已求得的最短路径的终点的集合,则可证明:下一条最短路径必然是从
v0出发,中间只经过 $S$ 中的顶点便可到达的那些顶点vx$(v_x \in V-S)$ 的路径。
1/* ----- Dijkstra算法 ----- */
2void ShortestPath(MTGraph G, int v) {
3 EdgeData dist[G.n]; // 最短路径长度数组
4 int path[G.n]; // 最短路径数组
5 int S[G.n]; // 最短路径顶点集
6 for (int i = 0; i < n; i++) {
7 dist[i] = G.edge[v][i]; // dist数组初始化
8 S[i] = 0; // 集合S初始化
9 if (dist[i] < MaxValue) {
10 path[i] = v;
11 }
12 else path[i] = -1; // path数组初始化
13 }
14 // 顶点v加入顶点集合
15 S[v] = 1;
16
17 // 从顶点 v 确定 n-1 条路径
18 for (int i = 0; i < G.n-1; i++) {
19 float min = MaxValue;
20 int u = v;
21 // 选当前不在集合 S 中具有最短路径的顶点 u
22 for (int j = 0; j < G.n; j++) {
23 if (!S[j] && dist[j] < min) {
24 u = j;
25 min = dist[j];
26 }
27 }
28 // 将顶点 u 加入集合 S
29 S[u] = 1;
30 // 修改可经过顶点 u 变短的路径值
31 for (int w = 0; w < G.n; w++) {
32 if (!S[w] && G.edge[u][w] < MaxValue && dist[u]+G.edge[u][w] < dist[w]) {
33 // 顶点 w 未加入 S,且经过 u 可以缩短路径值
34 dist[w] = dist[u] + G.edge[u][w];
35 // 修改到 w 的最短路径
36 path[w] = u;
37 }
38 } // 选定各顶点到顶点 v 的最短路径
39 }
40
41 for (int i = 0; i < G.n; i++) { // 打印各顶点的最短路径: 路径为逆向输出
42 printf("\n");
43 printf("Distance: %d; Path: %d", dist[i], i);
44 // 输出终点的最短路径长度和终点
45 int pre = path[i]; // 取终点的直接前驱
46 while(pre != v) { // 沿路径上溯输出
47 printf ("<-- %d ", pre);
48 if (pre == -1) {
49 break; // 无法从 v 到达该结点
50 }
51 pre = path[pre];
52 }
53 }
54}